É possível encontrar uma grande variedade de modelos 3D de dispositivos protéticos em open design, disponíveis para fazer download na internet.Para entender melhor o conceito de OPEN DESIGN, define-se este termo usado para descrever a união do Design ao conceito de Open Source, que é o código aberto, tendo como base distribuição livre de produto e permissão de trabalhos derivativos; a proposta do Open Design é promover o desenvolvimento da criação de projetos em design de forma integrada e colaborativa, facilitado pela internet e outras tecnologias da comunicação. (ROSSI, 2016).A comunidade e-NABLE – uma rede global de voluntários que usam a impressão 3D para dar ao mundo uma “mão amiga” – é hoje a maior referência em se tratando de próteses 3D. (Link: http://enablingthefuture.org/).
Vamos entender um pouco mais sobre próteses para então analisar os diferentes modelos disponibilizados pela e-NABLE.
UM POUCO MAIS SOBRE PRÓTESES
Pesquisas indicam que são três os tipos de prótese de membro superior no mercado atual: próteses estética, mecânica e mioelétrica.
Segundo Cunha (2002), a prótese estética não apresenta funcionalidade e, como o próprio nome sugere, só tem a função de se parecer com uma mão real sem permitir a realização de movimentos.

Imagem 1 – Prótese estética de mão / infantil
Fonte: http://img.medicalexpo.com/pt/images_me/photo-mg/74954-7263571.jpg
{kind=link}
Com relação à prótese mecânica, esta é indicada para próteses ativas acionadas por tirantes de tração. Cunha (2002) define este modelo como um dispositivo movimentado por outra parte do corpo com tirantes permitindo apenas a realização de movimentos limitados.


Imagens 2 e 3 – Próteses Mecânicas Modelo e-NABLEFonte: http://enablingthefuture.org/
Já as próteses mioelétricas são dispositivos médicos complexos acionados a partir da captação de estímulos nervosos, dos músculos do braço do paciente, que são transmitidos para motores elétricos posicionados na prótese para movimentar os dedos. (CUNHA, 2002).

Imagem 4 – Prótese Mioelétrica Modelo OttobockFonte: http://media.ottobock.comSegundo Ganga (2016) apud Carvalho (2004), as próteses podem ser classificadas conforme os níveis de amputação do braço do usuário:
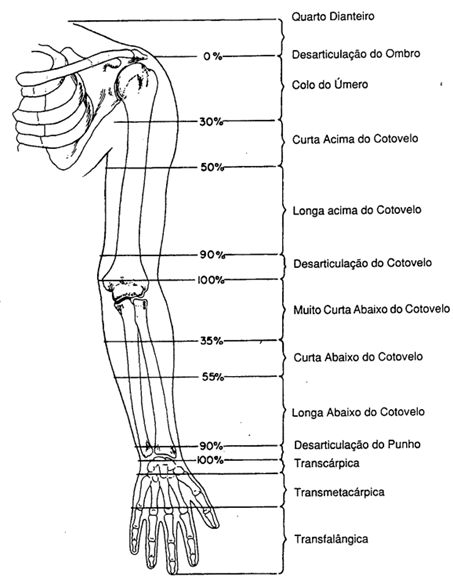
Figura5 (CARVALHO, 2004).
É preciso compreender ainda que o processo de protetização pode ser definido pela chamada “extremidade do coto”: segundo Cunha (2002), quanto mais proximal for a extremidade do coto, mais complicado será o processo de protetização.
Quando há desarticulação do ombro, a complexidade da protetização é ampliada, uma vez que nesse caso não há pontos de apoio para adaptação e fixação do encaixe da prótese (BLOHMKE, 1994).
MODELOS E-NABLE
A comunidade e-NABLE disponibiliza diferentes modelos 3D de próteses open design para serem baixados e impressos por qualquer pessoa que tenha acesso a uma impressora 3D.Para definir qual é o modelo mais adequado a um caso específico, pode-se seguir as recomendações indicadas pela própria e-NABLE, que apresenta três diferentes opções: os dispositivos protéticos mecânicos acionados pelo punho, os dispositivos protéticos mecânicos acionados pelo cotovelo e as próteses mioelétricas.DISPOSITIVO PROTÉTICO MECÂNICO ACIONADO PELO PUNHOA maioria dos modelos criados pela comunidade e-NABLE requer do usuário um punho funcional, especificamente que este tenha um punho capaz de dobrar ao menos 30 graus em qualquer direção. Além disso, é necessária pelo menos meia palma conservada, para que o dispositivo possa funcionar adequadamente.
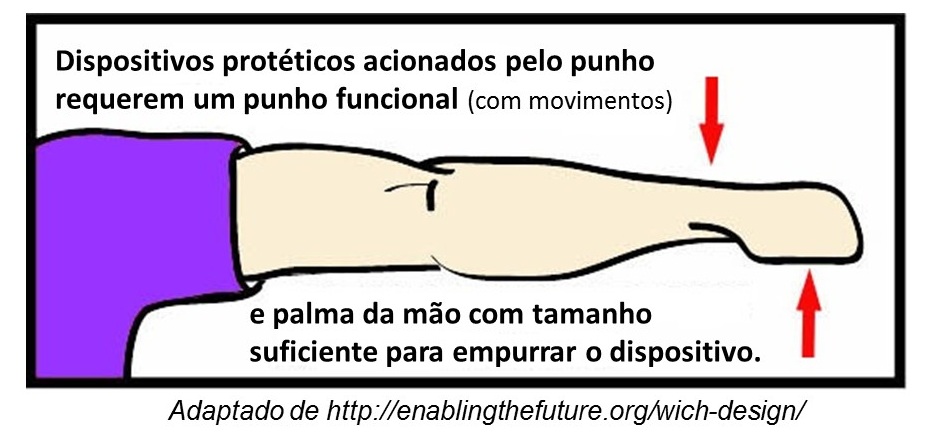
Para amputados ou pessoas com agenesia de mão que possuem um punho funcional, com palma da mão total ou parcial, a comunidade e-NABLE criou alguns projetos acionados através da flexão do punho. Esta flexão gera uma força capaz de abrir e fechar dos dedos do dispositivo protético, por meio de movimento mecânico.Assim, para o funcionamento adequado destes modelos, o usuário precisa ter um punho funcional que possa dobrar facilmente e palma suficiente para empurrar por força contra a porção de palma do projeto, criando um sistema de “alavanca”.Projetos de dispositivos protéticos open designs acionados pelo punho:- RAPTOR RELOADED– RAPTOR– TALON– CYBORG BEAST– ODY HAND– FLEXY HAND– PHOENIX HAND– OSPREY HAND
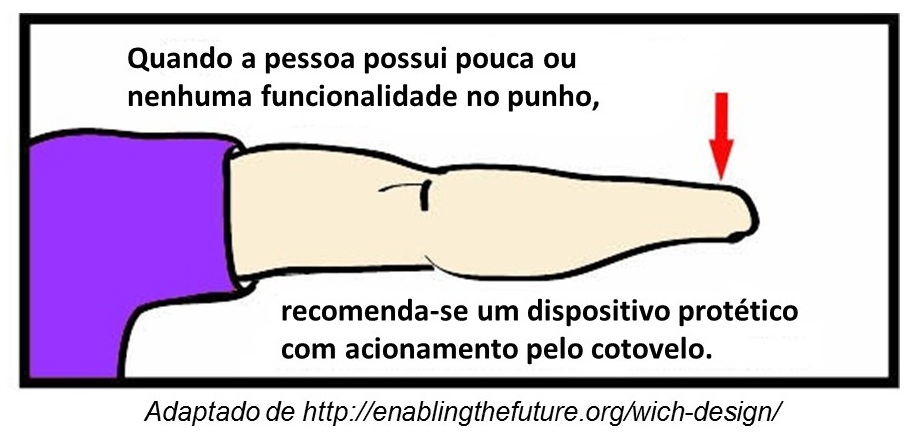
DISPOSITIVO PROTÉTICO MECÂNICO ACIONADO PELO COTOVELO
No caso de amputados ou pessoas com agenesia que não possuem um punho funcional ou a palma da mão, alguns modelos foram criados pela comunidade e-Nable que são acionados pela flexão do cotovelo.Para que estes projetos funcionem corretamente, o usuário deve ter um cotovelo funcional que dobre com facilidade e que mantenha maior parte do antebraço conservada pela amputação ou pela malformação congênita.
Projetos de dispositivos protéticos open designs acionados pelo cotovelo:- Team Unlimbited Arm– RIT Arm
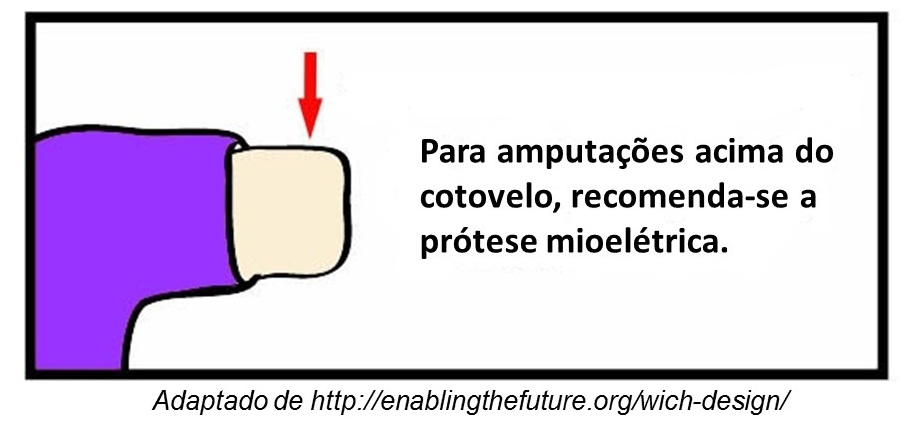
PRÓTESE MIOELÉTRICAEm caso de amputações ou malformações congênitas localizadas acima do cotovelo, o acionamento mecânico necessário pode gerar lesões no corpo a longo prazo. Por isso, a solução sugerida para estes casos é o uso das próteses mioelétricas. Este tipo de dispositivo é alimentado por baterias, sendo que a configuração necessária de motores e controladores faz com que a prótese fique pesada e tenha um alto custo que pode chegar a 100 mil reais, segundo Cunha (2002).
Até o presente momento, a comunidade e-NABLE não possui um projeto capaz de atender a este tipo de especificidade.Há algumas opções open design, no entanto estes projetos são de outros grupos que oferecem modelos 3D de próteses open-source para impressão.Projetos de Próteses Mioelétricas:- Limbitless Solutions Arm– Open Bionics – Open Hand Project– Exiii
Para obter ajuda e decidir qual dispositivo pode funcionar melhor para determinado caso de diferença de membros, é possível perguntar aos voluntários e designers da comunidade e-NABLE nos fóruns ou no grupo do Google+ os quais podem responder às dúvidas e auxiliar a criar um dispositivo protético para você ou alguém que você conhece. No Brasil, a ASSOCIAÇÃO DAR A MÃO pode auxiliar o trabalho de voluntários interessados em fazer parte deste trabalho. Entre em contato conosco na nossa página de contato
THE RAPTOR RELOADED
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/raptor-reloaded/

THE RAPTOR HAND
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/the-raptor-hand/

TALON HAND 2.X
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/talon-hand/

THE CYBORG BEAST
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/cyborg-beast/

THE ODYSSEUS HAND
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/odysseus-hand/

THE FLEXY HAND AND FLEXY HAND 2
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/the-flexy-hand/

OSPREY HAND
Disponível em: http://enablingthefuture.org/osprey-hand/

PHOENIX HAND
Disponível em: http://enablingthefuture.org/phoenix-hand/


OSPREY HAND
Disponível em: http://enablingthefuture.org/osprey-hand/
THE RIT ARM
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/rit-arm/

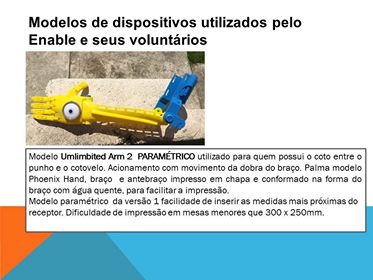
TEAM UNLIMBITED ARM
Disponível em: http://enablingthefuture.org/team-unlimbited-arm/

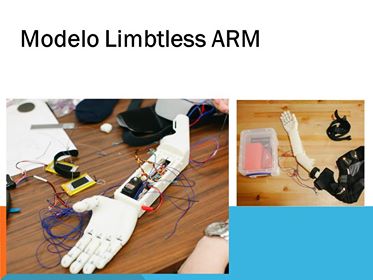
THE LIMBITLESS ARM
Disponível em: http://enablingthefuture.org/upper-limb-prosthetics/the-limbitless-arm/

HACKBERRY
Disponível em: http://exiii-hackberry.com/

OPEN HAND PROJECT
Disponível em: http://www.openhandproject.org/
REFERÊNCIAS BIBLIOGRÁFICAS
BLOHMKE, F. Compêndio Otto Bock: Próteses para o Membro Superior. Berlim: Schiele und Schön, 1994.BOTELHO, Marcelo. Elaboração de dispositivos de apoio protético, mioelétrico e serviços de reabilitação. Palestra do I Encontro Nacional de Agenesia, Familiares e Pessoas com Deficiência promovido pela
ASSOCIAÇÃO DAR A MÃO. Disponível em: < http://associacaodaramao.blogspot.com.br/2016/11/videos-i-encontro-de-agenesia-parte-3.html >. Acesso em 08/12/2016.
CARVALHO, GUSTAVO LONGHI DE. Proposta de um método de projeto de próteses de membros superiores com a utilização da engenharia e análise do valor. 2004. 166 f. Dissertação (Mestrado) – Curso de Engenharia Mecânica, Universidade de São Paulo, São Paulo, 2004.
CUNHA FL. Mão de São Carlos, uma prótese multifuncional para membros superiores: Um estudo de mecanismos, atuadores e sensores. 2002. V. Tese (Doutorado) – Escola de Engenharia de São Carlos, Universidade de São Paulo, São Paulo.
E-NABLE. Enabling the Future. Which Design. Disponível em: < http://enablingthefuture.org >. Acesso em 08/12/2016.GANGA, Thabata. Qual modelo usar? Disponível em: <https://mao3d.wordpress.com/2016/02/18/qual-modelo-usar/> Acesso em 06/12/2016.
ROSSI, Dorival Campos. Open Design, uma experiência aberta e colaborativa para o ensino de Design . UNESP. Disponível em: <http://pt.slideshare.net/hdneves/open-design-uma-experiencia-aberta-e-colaborativa-para-o-ensino-de-design> Acesso em 08/12/2016.